Memory Systems
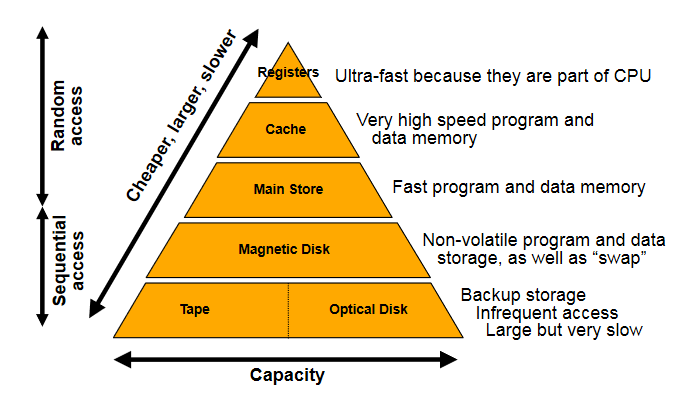
The Memory Hierarchy
- Memory systems must facilitate the reading and writing of data
- Many factors influence the choice of memory technology
- Frequency of access
- Access time
- Capacity
- Cost
- Memory wants to be low cost, high capacity, and also fast
- As a tradeoff, we organise memory into a hierarchy
- Allows for some high speed, some high capacity
- Data has to be dragged up the hierarchy
- Memory access is somewhat predictable
- Temporal locality - when a location accessed, likely the same location will be accessed again in the near future
- Spatial locality - when a location accessed, likely that nearby locations will be referenced in the near future
- 90% of memory access is within 2Kb of program counter
Semiconductor Memory Types
| Memory Type | Category | Erasure | Write Mechanism | Volatility |
|---|---|---|---|---|
| Random Access Memory (RAM) | Read-Write | Electronically, at byte-level | Electronically written | Volatile |
| Read Only Memory (ROM) | Read only | Not possible | Mask Written | Non-volatile |
| Programmable ROM (PROM) | Read only | Not possible | Electronically written | Non-volatile |
| Erasable PROM (EPROM) | Read (mostly) | UV light at chip level | Electronically written | Non-volatile |
| Electrically Erasable PROM (EEPROM) | Read (mostly) | Electronically, at byte-level | Electronically written | Non-volatile |
| Flash Memory | Read (mostly) | Electronically, at byte-level | Electronically written | Non-volatile |
- Particularly interested in random access
- RAM is most common - implements main store
- nb that all types shown here allow random access, name is slightly misleading
- RAM is also volatile, meaning it is erased when de powered
Cache
- If 90% of memory access is within 2Kb, store those 2Kb somewhere fast
- Cache is small, fast memory right next to CPU
- 10-200 times faster
- If data requested is found in cache, this is a "cache hit" and provides a big speed improvement
- We want things to be in cache
- Cache speed/size is often a bigger bottleneck to performance than clock speed
Moore's Law
- As said by the co-founder of intel, Gordon Moore, the number of transistors on a chip will double roughly every 18 months
- Less true in recent years
- Cost of computer logic and circuitry has fallen dramatically in the last 30 years
- ICs become more densely paced
- CPU clock speed is also increasing at a similar rate
- Memory access speed is improving much more slowly however
Cache Concepts
- Caching read-only data is relatively straightforward
- Don't need to consider the possibility data will change
- Copies everywhere in the memory hierarchy remain consistent
- When caching mutable data, copies can become different between cache/memory
- Two strategies for maintaining parity
- Write through - updates cache and then writes through to update lower levels of hierarchy
- Write back - only update cache, then when memory is replaced copy blocks back from cache
Cache Performance
Cache performance is generally measured by its hit rate. If the processor requests some block of memory and it is already in cache, this is a hit. The hit rate is calculated as
Cache misses can be categorised:
- Compulsory - misses that would occur regardless of cache size, eg the first time a block is accessed, it will not be in cache
- Capacity - misses that occur because cache is not large enough to contain all blocks needed during program execution
- Conflict - misses that occur as a result of the placement strategy for blocks not being fully associative, meaning a block may have to be discarded and retrieved
- Coherency - misses that occur due to cache flushes in multiprocessor systems
Measuring performance solely based upon cache misses is not accurate as it does not take into factor the cost of a cache miss. Average memory access time is measured as hit time + (miss rate miss penalty).
Cache Levels
Cache has multiple levels to provide a tradeoff between speed and size.
- Level 1 cache is the fastest as it is the closest to the cpu, but is typically smallest
- Sometimes has separate instructions/data cache
- Level 2 cache is further but larger
- Level 3 cache is slowest (but still very fast) but much larger (a few megabytes)
- Some CPUs even have a level 4 cache
Different levels of cache exist as part of the memory hierarchy.
Semiconductors
- RAM memory used to implement main store
- Static RAM (SRAM) uses a flip-flop as the storage element for each bit
- Uses a configuration of flip-flops and logic gates
- Hold data as long as power is supplied
- Provide faster read/write than DRAM
- Typically used for cache
- More expensive
- Dynamic RAM (DRAM) uses a capacitor, and the presence to denote a bit
- Typically simpler design
- Can be packed much tighter
- Cheaper to produce
- Capacitor charge decays so needs refreshing by periodically supplying charge
- The interface to main memory is a critical performance bottleneck
Memory Organisation
The basic element of memory is a one-bit cell with two states, capable of being read and written. Cells are built up into larger banks with combinatorial logic circuits to select which cell to read/write. The diagram shows an example of a 16x8 memory IC (16 words of 8 bytes).
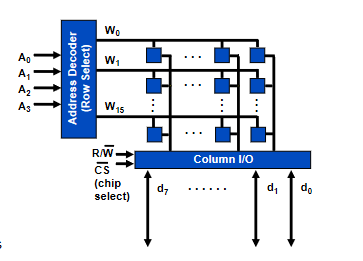
For a 16x8 memory cell:
- 4 address inputs
- 8 data lines
- word size
Consider alternatively a 1Kbit device with 1024 cells
- Organised as a 128x8 array
- 7 address pins
- 8 data pins
- Or, could organise as 1024x1 array
- 10 address pins
- 1 data pins
- Less pins but very poorly organised
- Best to keep memory cells square to make efficient use of space
Error Correction
Errors often occur within computer systems in the transmission of data dude to noise and interference. This is bad. Digital logic already gives a high degree of immunity to noise, but when noise is at a high enough level, this collapses.
Two common ways in which errors can occur:
- Isolated errors
- Occur at random due to noise
- Usually singular incidences
- Burst errors
- Errors usually occur in bursts
- A short period of time over which multiple errors occur
- For example, a 1ms dropout of a connection can error many bits
Majority Voting
- A simple solution to correcting errors
- Just send every bit multiple times (usually 3)
- The one that occurs the most is taken to be the true value
- Slow & expensive
Parity
- Parity adds an extra parity bit to each byte
- Two types of parity system
- Even parity
- The value of the extra bit is chosen to make the total number of 1s an even number
- Odd parity
- The value of the extra bit is chosen to make the total number of 1s an odd number
- Even parity
- 7 bit ascii for
Ais0100 0001- With even parity -
0100 0001 - Odd parity -
1100 0001
- With even parity -
- Can be easily computed in software
- Can also be computed in hardware using a combination of XOR gates
- Usually faster than in software
- Allows for easy error detection without the need to significantly change the model for communication
- Parity bit is computed and added before data is sent, parity is checked when data is received
- Note that if there is more than one error, the parity bit will be correct still and the error won't be detected
- Inadequate for detecting bursts of error
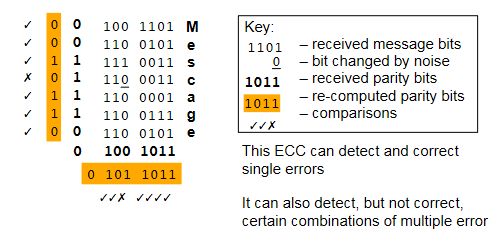
Error Correcting Codes
- ECCs or checksums are values computed from the entire data
- If any of the data changes, the checksum will also change
- The checksum is calculated and broadcast with the data so it can be checked on reception
- Can use row/column parity to compute an checksum
- Calculate parity of each row and of each column
- Diagram shows how parity bits detect an error in the word "Message"