Vectors
Vector Equation of a Straight Line
The vector is the vector of any point along the line.
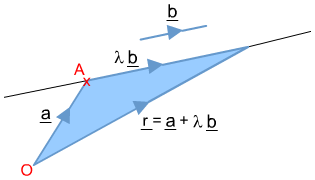
is any point on the line, and \bm{b} is the direction of the line. is a parameter that represents the position of relative to along the line. The carteian form of this can be derived:
Equating about lambda:
Scalar/Dot Product
The dot product of two vectors:
- If , then and
- The two vectors are perpendicular
The angle between two vectors can be calculated using the dot product
Projections
The projection of vector in the direction of is given by the scalar product:
This gives a vector in the direction of with the magnitude of .
Equation of a Plane
The vector equation of a plane is given by
Where is the normal to the plane, and is any point in the plane. This expands to the cartesian form:
Angle Between Planes
The angle between two planes is given by the angle between their normals.
Intersection of 2 Planes
Two planes will only intersect if their normal vectors intersect.
- First, check the two normals are non parallel
- Equate all 3 variables about either a parameter or one of , , or to get an equation for the line along which the planes intersect in cartesian form
Example
Find the intersection of the planes (1) and (2).
(1) - (2):
(1) + 3(2):
Equating the two with z:
Using Cross Product
For two normals to planes and , the vector will lie in both planes. The line
lies in both planes.
Distance from Point to Plane
The shortest distance from the point to the plane is given by:
Vector/Cross Product
The cross product of two vectors produces another vector, and is defined as follows
is the angle between the two vectors, and is a unit vector perpendicular to both and . The right-hand rule convention dictates that should always point up (ie, if and are your fingers, then is your thumb). The cross product is not commutative, as = .
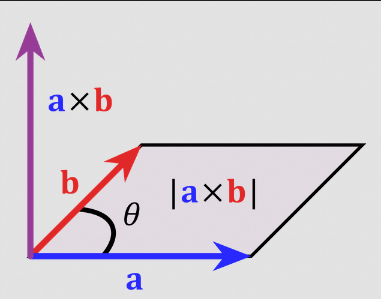
- The magnitude of the cross product is equal to the area of the parallelogram formed by the two vectors.
- Can be used to find a normal given 2 vectors/2 points in a plane
Angular Velocity
A spheroid rotates with angular velocity . A point on the spheroid has velocity