Translational Mechanical Systems
- Translational systems involve movement in 1 dimension
- For example, a the suspension in a car going over bumps going up and down
- System diagrams can be used to represent systems
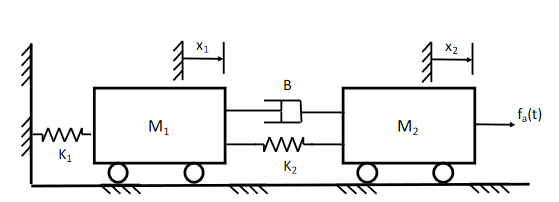
- Diagrams include:
- Masses
- Springs
- Dampers
Elements
There are element laws to model each of the three elements involved in mechanical systems. They are modelled using two key variables:
- Force in newtons ()
- Displacement in meters ()
- Also sometimes velocity in meters per second ()
When modelling systems, some assumptions are made:
- Masses are all perfectly rigid
- Springs and dampers have zero mass
- All behaviour is assumed to be linear
Mass
- Stores kinetic/potential energy
- Energy storage is reversible
- Can put energy in OR take it out
Elemental equation (Newton's second law):
Kinetic energy stored:
Spring
- Stores potential energy
- Also reversible energy store
- Can be stretched/compressed
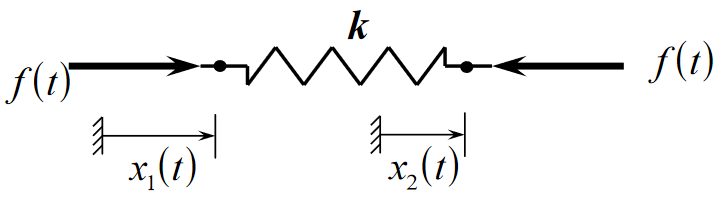
Elemental equation (Hooke's law):
The spring constant k has units . Energy Stored:
In reality, springs are not perfectly linear as per hooke's law, so approximations are made. Any mechanical element that undergoes a change in shape can be described as a stiffness element, and therefore modelled as a spring.
Damper
Dampers are used to reduce oscillation and introduce friction into a system.
- Dissapates energy as heat
- Non reversible energy transfer
- Takes energy out of the system
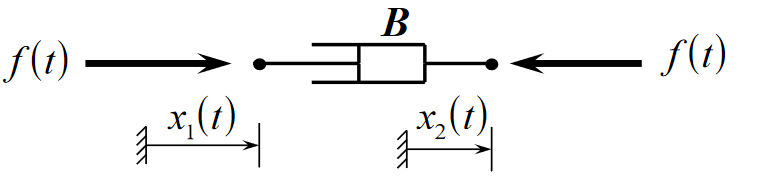
Elemental equation:
B is the damper constant and has units
Interconnection Laws
Compatibility Law
- Elemental velocities are identical at points of connection
Equilibrium Law
- Sum of external forces acting on a body equals mass x acceleration
- All forces acting on a body in equilibrium equals zero
Fictitious/D'alembert Forces
D'alembert principle is an alternative form of Newtons' second law, stating that the force on a body is equal to mass times acceleration: . is the inertial, or fictitious force. When modelling systems, the inertial force always opposes the direction of motion.
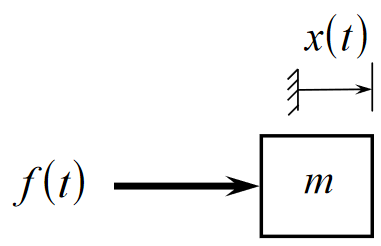
Example:
Form a differential equation describing the system shown below.
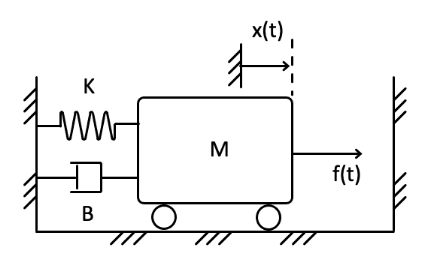
4 forces acting on the mass:
- Spring:
- Damper:
- Inertial/Fictitious force:
- The force being applied,
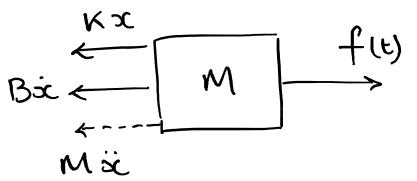
The forces all sum to zero: