Z Transforms
Difference Equations
A difference equation is a discrete equivalent of a differential equation, used in situations where only discrete values can be measured:
becomes
These can be solved numerically by just evaluating the output for each value of n. For example:
This evaluates to:
Alternatively, there is an analytical solution...
The z Transform
Consider a discrete sequence . The z transform of this sequence is defined as:
A closed-form expression can generally be found by the sum of the infinite series. For example, the z transform of the unit step :
This is a geometric series with , , hence the sum is
Taking a z transform of a difference equation converts it to a continuous function. The z domain is similar to the laplace domain, but for discrete time signals instead.
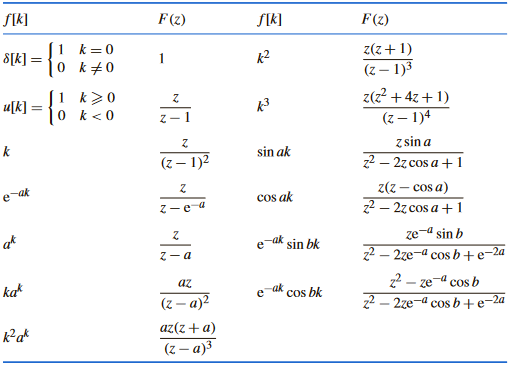
Common z Transforms
z Transform Properties
z transforms have linearity, the same as laplace and fourier transforms.
First Shift Theorem
If is a sequence and it's transform, then
For example, if :
For :
Second Shift Theorem
The function is defined:
Where is the unit step function. The function , where is a positive integer, represents a shift to the right of this function by sample intervals. If this shifted function is sampled, we have . The second shift theorem states:
Inverse z Transforms
z transforms are inverted using lookup tables, but to get them into a recognisable form, some manipulation is often needed, including partial fractions. For example, finding the inverse transform of :
The first term can be seen immediately from the table:
The second term rearranges to give:
This is in the form of the second shift theorem, so this can be applied to give:
Thus,
Example
Solve , where , .
Taking z transforms:
Rearranging and using initial conditions:
Using partial fractions:
Using inverse transforms straight from the table to get the solution: